 Cliquer ici pour accéder à la visualisation.
Cliquer ici pour accéder à la visualisation.
Utilisez la souris pour faire tourner et zoomer.
On vous prévient tout de suite, c’est pas joli !
Une application linéaire f : ℝn → ℝn est une fonction qui peut-être vu comme un système dynamique qui fait bouger les vecteurs de ℝn.
Le but de cet outil est de visualiser une application linéaire comme un système dynamique, agissant sur les points de ℝ3. Cela dit, comme il l’est montré dans le tutoriel présenté à la fin de ce document, l’outil est beaucoup plus général et peut être utilisé pour visualiser des nuages de points dans un espace tri-dimensionnel, sans qu’une application linéaire soit impliquée.
Un dernier point important est le fait qu’il n’est pas nécessaire d’installer quelque logiciels que ce soit. On utilise uniquement des logiciels standards, déjà installés sur pratiquement tous les ordinateurs.
On considère l’application linéaire donnée par la matrice
$$
\mathbf{A} = \begin{pmatrix}
\frac{1}{2} & 0 & \frac{3}{2} \\
0 & \frac{1}{2} & \frac{3}{2} \\
0 & 0 & 2
\end{pmatrix}
$$
Cette application linéaire possède deux espaces propres.
On dit toujours que les vecteurs propres et valeurs prores nous aident à comprendre l’application linéaire. Mais qu’en est-il vraiment ?
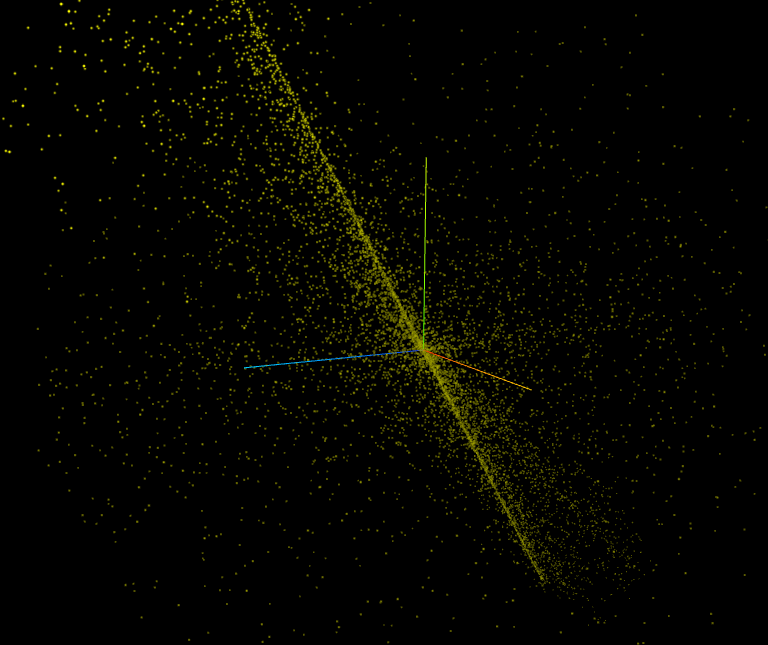
Toutes les visualisation qui suivent fonctionnent sur le même principe:
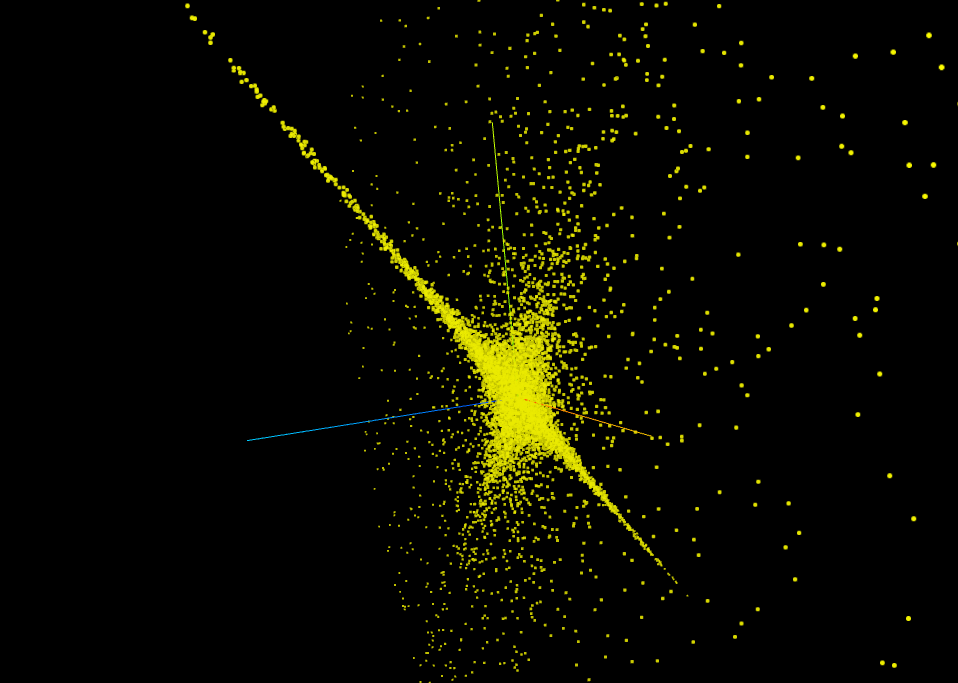
Les points sont positionnés aléatoirement dans l’espace ℝ3 et la matrice appliquée sur chaque point est la matrice A.
Cliquer ici pour accéder à la visualisation.
Utilisez la souris pour faire tourner et zoomer.
On vous prévient tout de suite, c’est pas joli !
C’est chaotique ! Les points sont déplacés dans tous les sens, mais on peut déjà voir qu’il se passe quelque chose avec la droite x = y = z.
Les points sont encore positionnés aléatoirement dans l’espace ℝ3, mais on souhaite appliquer partiellement la matrice A.
Qu’est-ce que cela signifie ? Pour répondre à cette question, on considère la diagonalisation de la matrice A.
$$
\begin{array}{ccccc}
\mathbf{A} &=& \mathbf{P} & \mathbf{D} & \mathbf{P}^{-1} \\
\begin{pmatrix}
\frac{1}{2} & 0 & \frac{3}{2} \\
0 & \frac{1}{2} & \frac{3}{2} \\
0 & 0 & 2
\end{pmatrix}
&=&
\begin{pmatrix}
1 & 0 & 1 \\
0 & 1 & 1 \\
0 & 0 & 1
\end{pmatrix}
&
\begin{pmatrix}
\frac{1}{2} & 0 & 0 \\
0 & \frac{1}{2} & 0 \\
0 & 0 & 2
\end{pmatrix}
&
\begin{pmatrix}
1 & 0 & -1 \\
0 & 1 & -1 \\
0 & 0 & 1
\end{pmatrix}
\\
\end{array}
$$
Une propriété bien connue d’une telle diagonalisation est que si on élève A à la puissance k, l’égalité devient
$$
\begin{array}{ccccc}
\mathbf{A} &=& \mathbf{P} & \mathbf{D}^k & \mathbf{P}^{-1} \\
\begin{pmatrix}
\frac{1}{2} & 0 & \frac{3}{2} \\
0 & \frac{1}{2} & \frac{3}{2} \\
0 & 0 & 2
\end{pmatrix}
&=&
\begin{pmatrix}
1 & 0 & 0 \\
0 & 1 & 0 \\
0 & 0 & 1
\end{pmatrix}
&
\begin{pmatrix}
\left(\frac{1}{2}\right)^k & 0 & 0 \\
0 & \left(\frac{1}{2}\right)^k & 0 \\
0 & 0 & \left(2\right)^k
\end{pmatrix}
&
\begin{pmatrix}
1 & 0 & -1 \\
0 & 1 & -1 \\
0 & 0 & 1
\end{pmatrix}
\\
\end{array}
$$
Ceci permet de contrôler l’effet de la matrice A sur les points. En particulier, si on pose $k = \frac{1}{10}$, multiplier un vecteur v par Ak dix fois est équivalent à appliquer A une seule fois.
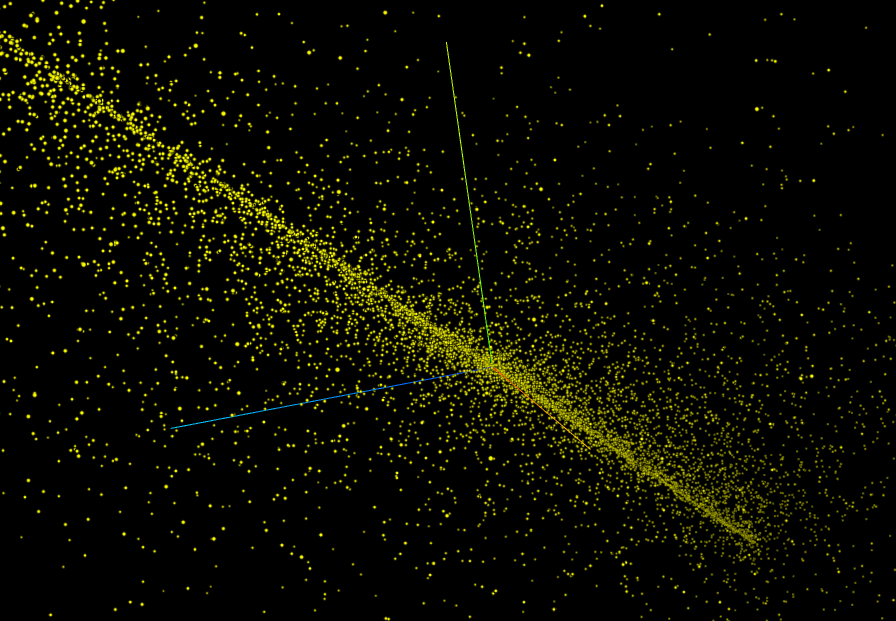
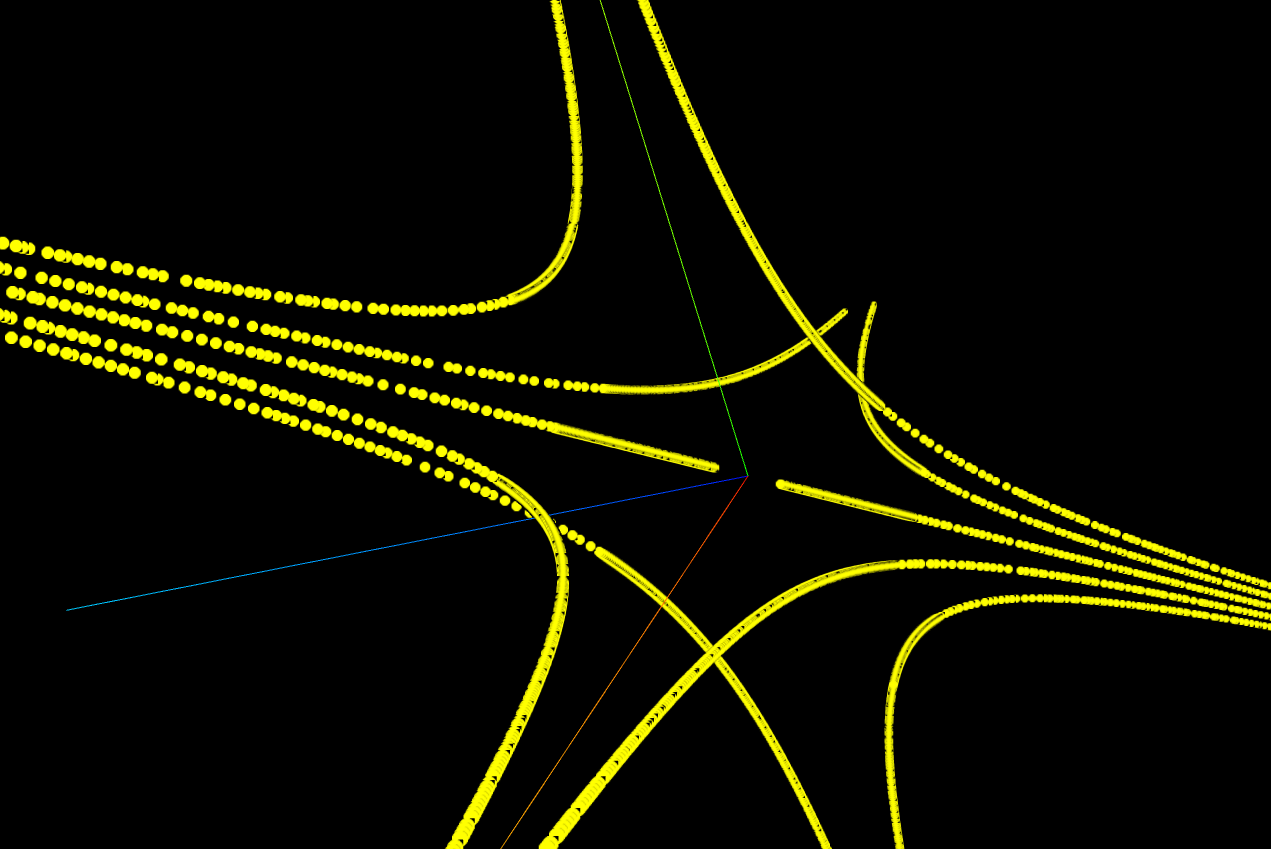
Dans le prochain exemple, les points sont déplacés en les multipliant par la matrice A0.005.
Cliquer ici pour accéder à la visualisation.
C’est déjà plus intéressant ! On peut voir que les points sont attirés vers la droite x = y = z et qu’une fois rendus près de cette droite, ils sont propulsés toujours de plus en plus loin de l’origine. C’est normal, la valeur propre associée à cet espace propre étant supérieure à 1, il y a une dilatation le long de cette droite..
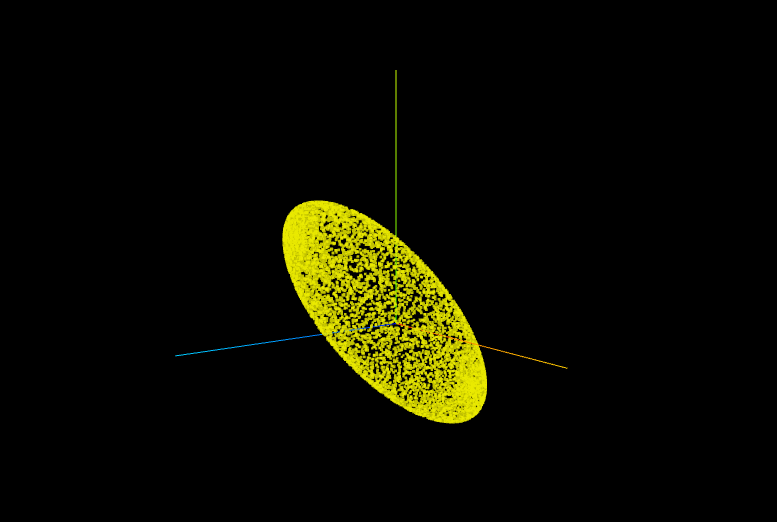
Dans cette version, les points sont initialisés de manière aléatoire, mais lorsqu’ils sont repositionnés, ils sont tous placés sur le plan z = 0.
Comme le plan z = 0 est un espace propre associé à la valeur propre λ1 = 1/2, ce plan est contractant. Les points sont donc aspirés vers l’origine.
Cliquer ici pour accéder à la visualisation.
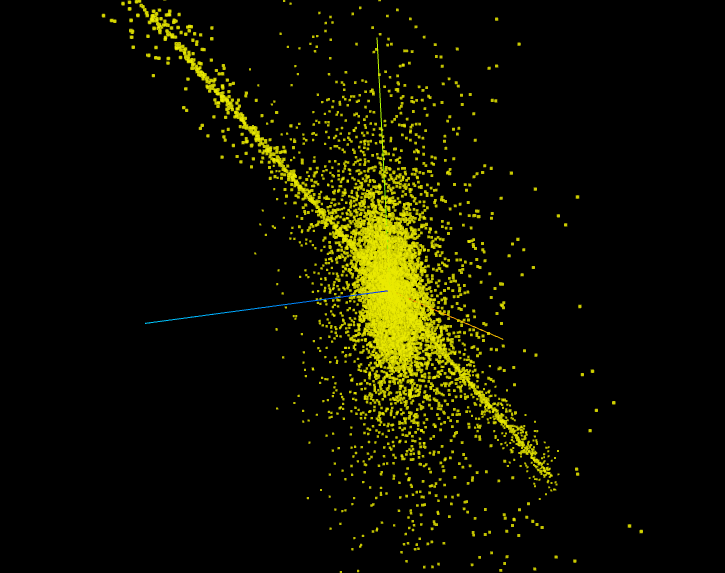
On reprend l’exemple précédent, mais cette fois-ci, on ne positionne pas les points directement sur le plan z = 0. On les positionne juste un petit peu à côté de ce plan. Concrètement, la composante en z des nouveaux points est une valeur aléatoire dans l’intervalle [ − 0.05, 0.05].
Cliquer ici pour accéder à la visualisation.
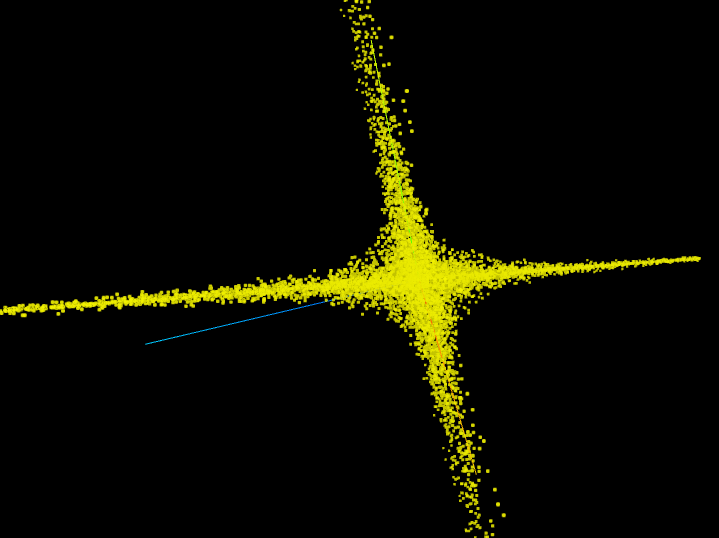
On change d’application linéaire. On considère A la matrice de l’application linéaire qui associe la valeur propore λ1 = 1/2 à la droite x = y = z et λ2 au plan z = 0.
$$
\begin{array}{ccccc}
\mathbf{A} &=& \mathbf{P} & \mathbf{D} & \mathbf{P}^{-1} \\
\begin{pmatrix}
2 & 0 & -\frac{3}{2} \\
0 & 2 & -\frac{3}{2} \\
0 & 0 & \frac{1}{2}
\end{pmatrix}
&=&
\begin{pmatrix}
1 & 0 & 1 \\
0 & 1 & 1 \\
0 & 0 & 1
\end{pmatrix}
&
\begin{pmatrix}
2 & 0 & 0 \\
0 & 2 & 0 \\
0 & 0 & \frac{1}{2}
\end{pmatrix}
&
\begin{pmatrix}
1 & 0 & -1 \\
0 & 1 & -1 \\
0 & 0 & 1
\end{pmatrix}
\\
\end{array}
$$
Pour que la visualisation soit plus intéressante, lorsqu’un point est repositionné, on le place à proximité de la droite x = y = z.
Cliquer ici pour accéder à la visualisation.
On reprend la Version 4 et on initialise les points sur une sphère de rayon 2, centrée à l’origine. Pourquoi ? Aucune idée !
Cliquer ici pour accéder à la visualisation.
Cliquer ici pour accéder à la visualisation.
Cet outil est conçu avec une idée directrice : la simplicité !
Logiciels nécessaires : - Un navigateur web (Chrome, Firefox, Safari, Edge, etc.) - Un éditeur texte (Bloc note, NotePad++, Sublime Text, Visual Studio Code, etc.)
C’est tout !
Le tutoriel prend la forme d’un exemple simple. Voici la visualisation.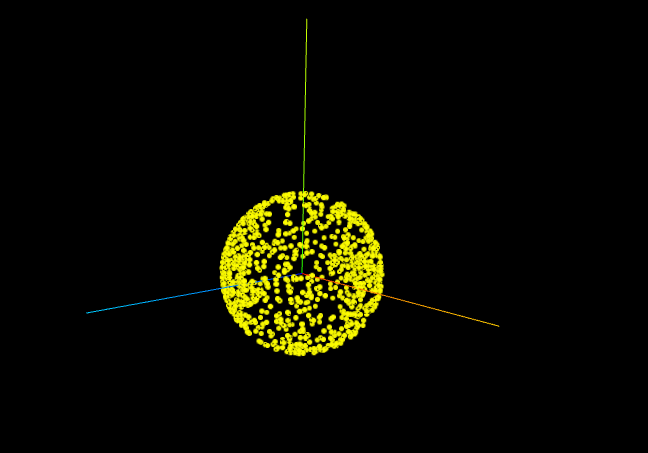
Cliquer ici pour accéder à la visualisation.
Pour reproduire cette visualisation, suivez les étapes suivantes.
tutoriel.html avec le navigateur (habituellement, il suffit de double-cliquer sur le fichier).tutoriel.html avec un éditeur texte.Une fois les mécanismes compris, vous pouvez créer vos propres visualisations et, surtout, n’oubliez pas de les partager !