Region based segmentation with levelsets
Edge based segmentations are intuitive since edges usually show an object boundary. However in some or many cases, edges are not sharp or are simply not there. Region based segmentations is a solution to this problem. Here is an example using a level set framework.
Edge based segmentation
When trying to isolate an object, its edges are good hints for the object boundary. That is why typical edge based objective functions make use of the gradient
Here, the parameter
![]() or
or
![]() defines
the range of penalizing gradient values: if
defines
the range of penalizing gradient values: if
![]() is high or
if
is high or
if
![]() is low then only the strongest gradients will stop
motion.
is low then only the strongest gradients will stop
motion.
When an object boundary is obvious (see figure below), these objective functions work well.
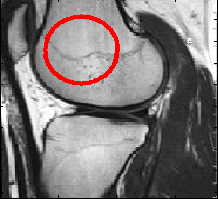
However if the object boundary is not well defined, a weak gradient will not
stop the contour. Changing the parameter
![]() or
or
![]() will possibly slow down the level set motion but it will
not prevent the contour to go beyond the boundary. There will be leakage in
the neighboring regions as shown in the figure below.
will possibly slow down the level set motion but it will
not prevent the contour to go beyond the boundary. There will be leakage in
the neighboring regions as shown in the figure below.

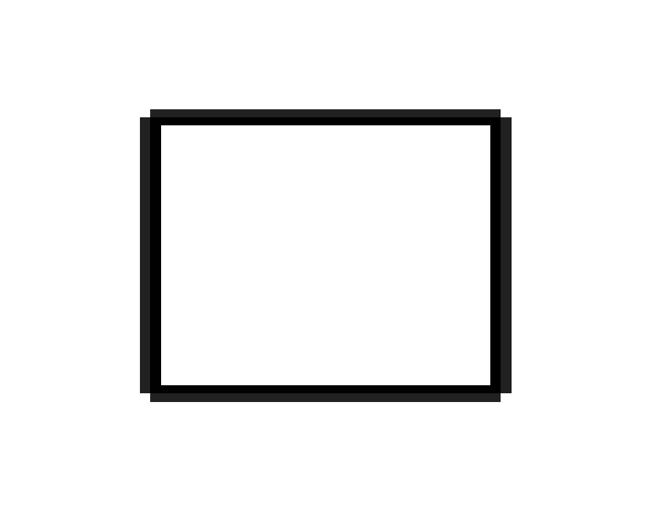
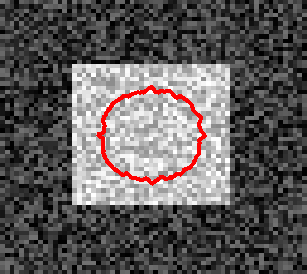
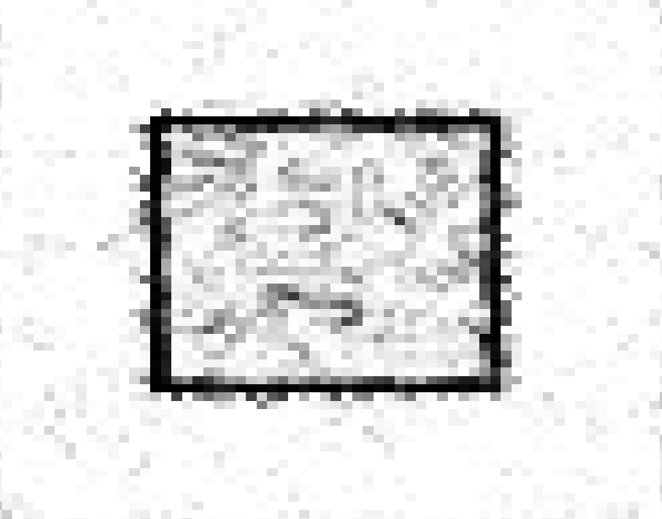
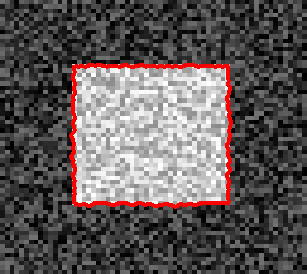
Now, simple synthetic examples will be used in order to illustrate the leakage, and this will help find a solution. The figure below shows an ideal situation with a bright square on a dark background. Its gradient shows a clear boundary. The level set will be stopped there.
|
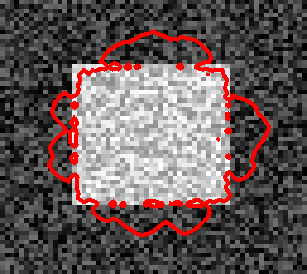
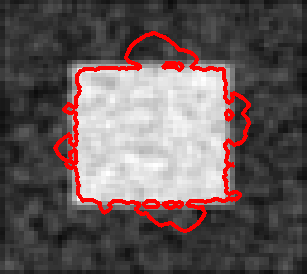
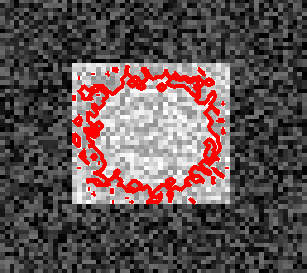
To get closer to real situations, a gaussian noise has been added to the last image. It is still possible to see a bright square on a dark background, but the image gradient does not show a clear single boundary any more. Some spots on the boundary have a weak gradient. This is where leakage will happen as shown in the figure below:
|
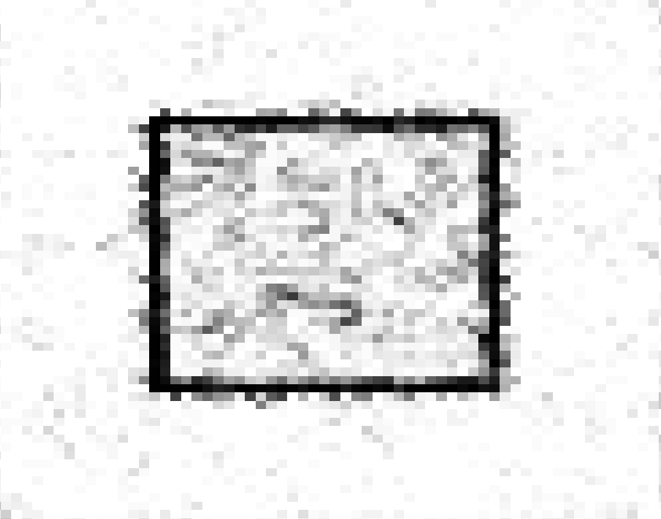
Filtering the image may help, but there is a chance the edges get blurred and leakage will then still occur. In any case, the image is modified and information may be lost. Below is an example of bluring with a gaussian filter, the gradient looks better, but there is still a leakage.
|
Region based
The segmentation problem can be tackled differently: instead of looking for
boundaries, we look for regions. That means the objective function should
enhance regions rather than boundaries. In a level set framework, two regions
are easily known with
![]() , inside the contour, and with
, inside the contour, and with
![]() , outside the
contour. The objective function can measure the homogeneity of both regions.
, outside the
contour. The objective function can measure the homogeneity of both regions.
One way of measuring the homogeneity of a region is with the least squared mean. For this, the mean of pixel intensities of each region is needed:
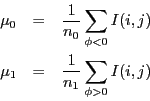
with here n0 the number of pixels inside the contour, n1 the number of pixels outside the contour. The least squared mean is then:
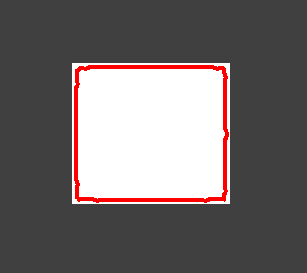
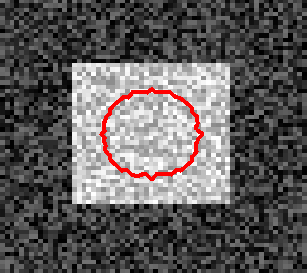
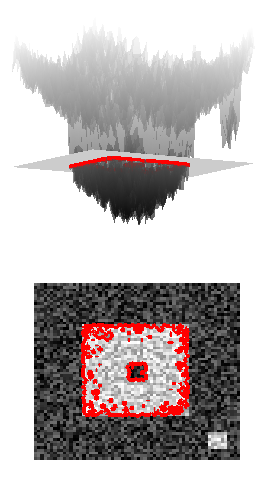
With this objective function, if a pixel has an intensity too different than the mean of region where he is currently classified, it will be penalized. If its intensity is closer to the mean of the other region, the level sets will eventually classify this pixel in the other region. The example below shows how this objective function behaves in the previous problem.
|
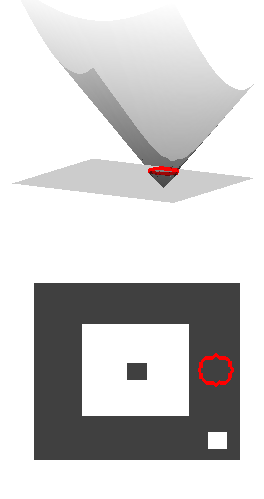
As the level sets evolve, pixels get classified in the region where the mean is closer to the pixel intensity. However, the previous object function is always positive, that means the level sets cannot move back or undo a decision. If a pixel is wrongly classified within an initial contour, it will remain misclassified. This is shown in the figure below.
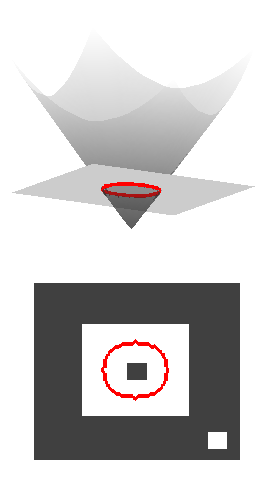
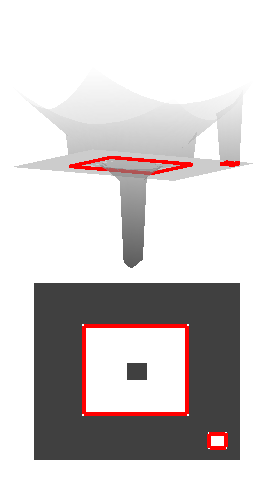
From the previous example, the surface
![]() is shown, the force always
positive makes the surface only move downward. The contour can then only grow
outward. In such a situation, the dark square inside the initial contour cannot
be classified as a background. For that to happen, the surface would have to
move upward.
is shown, the force always
positive makes the surface only move downward. The contour can then only grow
outward. In such a situation, the dark square inside the initial contour cannot
be classified as a background. For that to happen, the surface would have to
move upward.
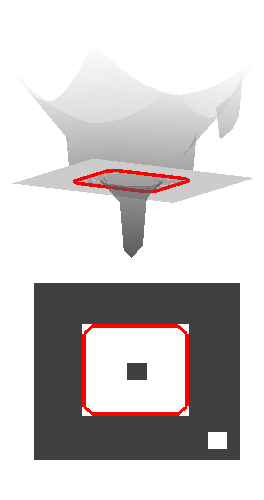
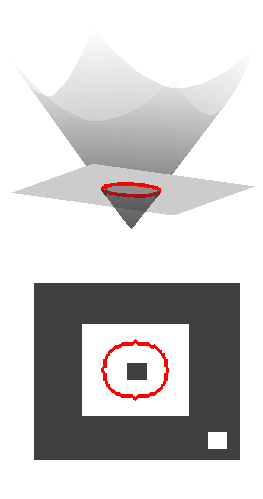
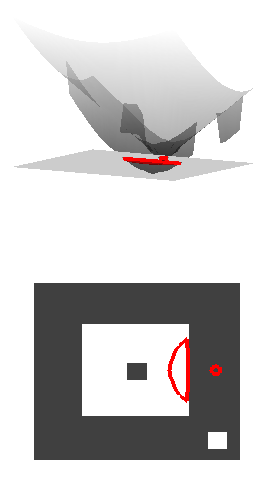
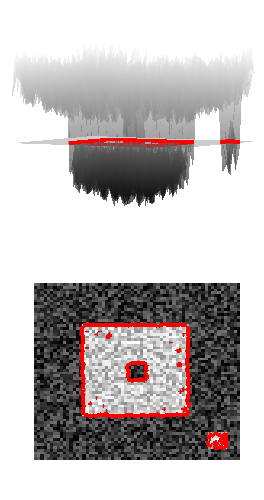
Instead of using the squared mean, the plain difference to the mean would allow negative forces.
If the dark square gets incorrectly selected, the first term of the objective function is negative, and the surface will move upward as shown in the figure below.
|
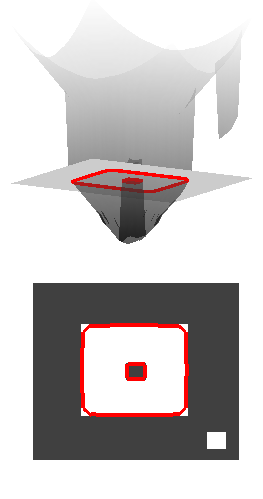
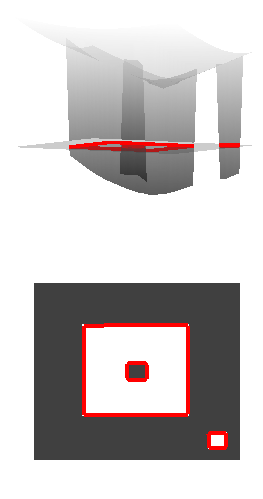
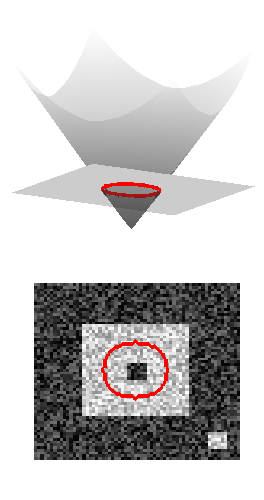
The last objective function will always select brighter region. So if the
initial contour is placed in a dark area, the surface will evolve so that
![]() will become the bright region as shown in the figure below.
will become the bright region as shown in the figure below.
|
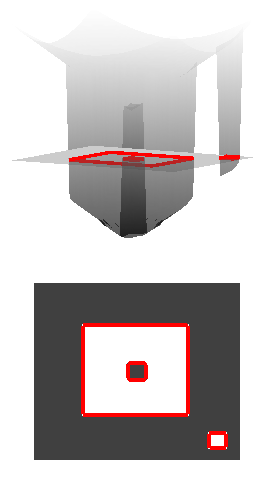
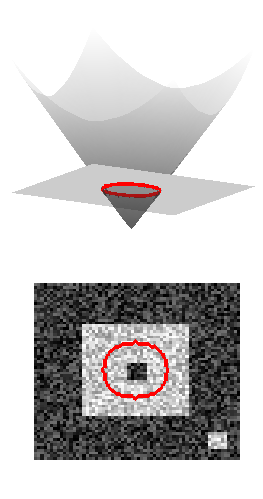
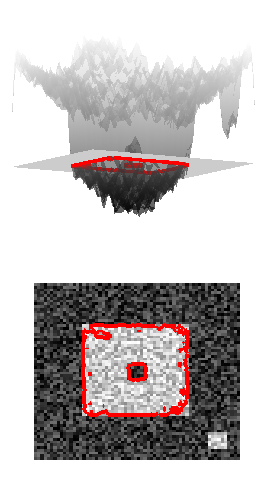
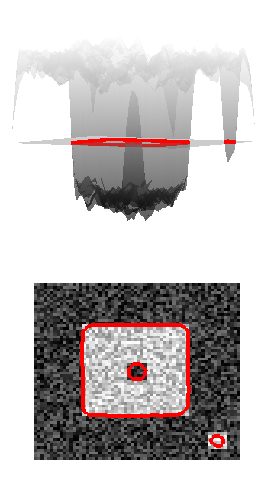
The last objective function is robust to noise as long as the noise does not change the homogeneity of each region: bright regions with noise will still remain bright, and dark regions with noise will still remain dark. The example below shows the last image with noise.
|
Every point on the surface is independant from its neighboring points and can
have a different motion. That is why noise creates a spiky surface. Adding tension to the
surface will make each point dependant from their neighbors, and it will
prevent spikes. Adding a curvature term
![]() to the
objective function gives:
to the
objective function gives:
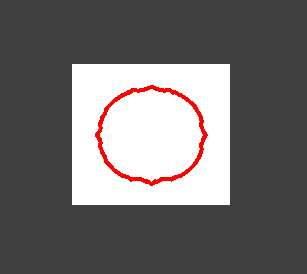
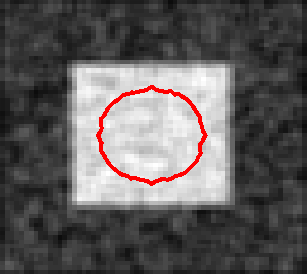
However if this term is important, sharp corners (as in a square) get lost. The example below shows the same situation as before with a little viscosity added, corners get a little bit rounded.
|
With this last result, the leaking problem has been solved. Notice also that unconnected contours, in particular inner contours are now handled.
Results
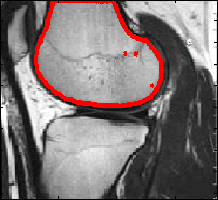
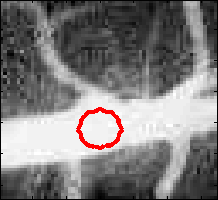
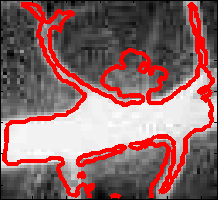
Using the previous objective function, it is now possible to segment the vessel image as shown below.
|


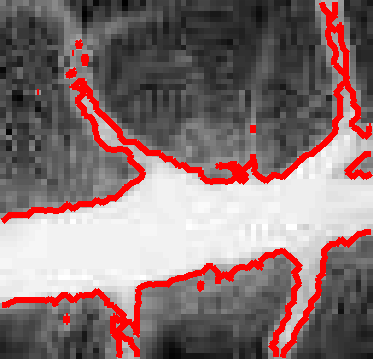
This picture shows that region based segmentation are not prune to leakage. However, the boundary may not be exactly where one think it would be. A mixture of edge based terms and region based terms in the objective function might be a good combination.
Herve Lombaert 2006-03-05